Robot dogs are no longer limited to research labs or expensive industrial projects. The Pupper robot changed that by making quadruped robotics more accessible for students, developers, and hobbyists. Today, platforms like Stanford Pupper and Mini Pupper are widely used for robotics learning, AI testing, and ROS development.
Unlike toy robot pets, Pupper robots are designed for real robotics experimentation. They support autonomous movement, inverse kinematics, reinforcement learning, and computer vision projects. Most models are open source, which means users can modify both the hardware and software.
The biggest reason behind the popularity of Pupper robots is cost efficiency. Commercial robot dogs such as Boston Dynamics Spot can cost tens of thousands of dollars. In comparison, Mini Pupper kits usually cost a few hundred dollars, while Stanford Pupper projects are built specifically for affordable robotics research.
If you are searching for a practical robot dog for programming, AI learning, or robotics education, understanding how Pupper robots work is important before buying or building one.
What Is a Pupper Robot?
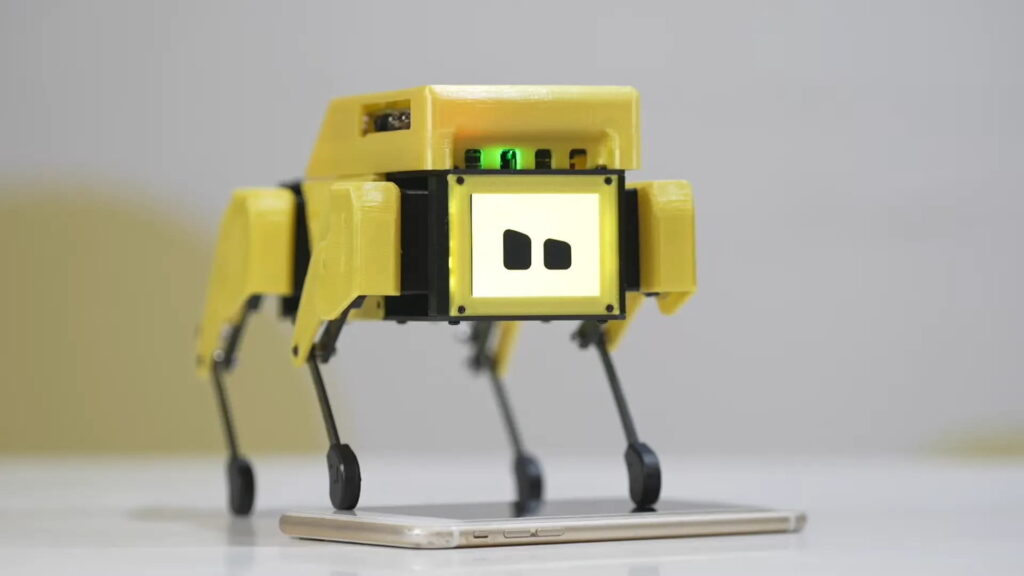
A Pupper robot is a small quadruped robot dog designed for robotics education and experimentation. The project became popular through the open-source Stanford Pupper initiative developed for teaching modern robotics concepts at lower costs.
These robots can walk, trot, balance, and navigate terrain using motorized legs and onboard sensors. Most models run on Raspberry Pi hardware and support ROS (Robot Operating System).
The term “Pupper robot” usually refers to three categories:
- Stanford Pupper
- Mini Pupper
- DIY custom Pupper builds
The idea behind the project is similar to larger robot dogs like Spot and Unitree, but focused on accessibility and education.
For readers unfamiliar with quadruped robotics, the concept is closely related to the field of Robotics discussed on Wikipedia’s Robotics page.
Stanford Pupper Explained
The Stanford Pupper is one of the most recognized open-source quadruped robots in the education sector. It was originally created to help students learn robot locomotion, controls, and AI systems without using expensive industrial hardware.
Key Features of Stanford Pupper



Some important features include:
- Brushless motors for smoother movement
- Omnidirectional walking and trotting
- Real-time control systems
- Open-source mechanical design
- Reinforcement learning compatibility
- ROS integration
The robot is designed for dynamic movement. It can maintain balance while changing direction and can adapt to uneven surfaces better than simpler educational robots.
Stanford Pupper Specifications
| Feature | Details |
|---|---|
| Controller | Raspberry Pi |
| Locomotion | Quadruped |
| Software | ROS, Python |
| Motors | Brushless |
| Main Purpose | Robotics research and education |
One major advantage is customization. Developers can change gait algorithms, sensor modules, and AI models without being restricted by proprietary software.
That flexibility is why universities and robotics clubs frequently use Pupper robots for competitions and research projects.
What Is Mini Pupper?
Mini Pupper is a smaller consumer-friendly version inspired by Stanford Pupper. It focuses more on beginners, STEM education, and lightweight robotics development.
Compared to Stanford Pupper, Mini Pupper is easier to assemble and requires less advanced robotics knowledge.
Main Features of Mini Pupper
- Raspberry Pi based computing
- ROS support
- Camera integration
- OpenCV compatibility
- Voice interaction support
- Compact body design
Mini Pupper is commonly used for:
- Learning Python robotics programming
- AI vision projects
- Remote control experiments
- Educational robotics workshops
Mini Pupper vs Stanford Pupper



| Feature | Mini Pupper | Stanford Pupper |
|---|---|---|
| Best For | Beginners | Researchers |
| Setup Difficulty | Easier | Advanced |
| Cost | Lower | Higher |
| AI Capabilities | Moderate | Advanced |
| Customization | Medium | Extensive |
This difference matters because many buyers search for a robot dog without understanding the learning curve involved.
Mini Pupper works better for first-time robotics learners. Stanford Pupper suits users who already understand ROS, robotics programming, or AI experimentation.
How a Pupper Robot Works
A Pupper robot combines sensors, motors, software, and onboard computing to simulate animal-like movement.
Core Components
Most builds include:
- Servo or brushless motors
- IMU sensors for balance
- Raspberry Pi controller
- Batteries and power boards
- Cameras or LiDAR sensors
The movement system depends heavily on inverse kinematics. This allows each leg to calculate positioning angles during movement.
The robot constantly processes sensor data to maintain stability while walking or turning.
Software and Programming
Most Pupper robots use ROS. This framework is widely used in robotics because it simplifies communication between sensors, motors, and AI systems.
Common programming languages include:
- Python
- C++
- ROS nodes
Developers often create projects such as:
- Obstacle avoidance
- Autonomous navigation
- Voice-controlled movement
- AI-powered object detection
This makes the Pupper platform more than a simple toy. It functions as a real robotics learning environment.
Why Pupper Robots Are Popular in Robotics Education
Educational robotics has grown rapidly over the last decade. According to multiple STEM education reports, robotics-related learning programs continue expanding globally because schools increasingly focus on AI and automation skills.
Pupper robots fit this trend because they provide hands-on robotics experience without industrial-level costs.
Key Educational Benefits
- Students learn practical robotics programming
- Users understand locomotion algorithms
- ROS training becomes easier
- AI experimentation becomes affordable
Many robotics kits only teach basic movement. Pupper robots go further by supporting real-world robotics concepts used in advanced research environments.
This is one reason why robotics communities frequently recommend them for intermediate learners.
How to Build a Pupper Robot
Building a Pupper robot usually involves both hardware assembly and software configuration.
Components Needed
Typical builds require:
- Raspberry Pi
- Robot frame
- Motors
- Motor controllers
- Battery pack
- Sensors
Basic Setup Process
- Assemble the mechanical frame
- Install motors and wiring
- Configure Raspberry Pi
- Install ROS packages
- Calibrate movement systems
The software setup is often the hardest part for beginners.
Common problems include:
- ROS dependency errors
- Motor calibration issues
- Power instability
- Incorrect gait configuration
Users with Linux experience generally complete setup faster.
Pupper Robot vs Other Robot Dogs
Many buyers compare Pupper robots with commercial quadruped robots.
Pupper Robot vs Spot
Spot is significantly more advanced for industrial applications. However, it is also dramatically more expensive.
Pupper robots are educational platforms, not industrial inspection machines.
Pupper Robot vs Unitree
Unitree Robotics robot dogs offer stronger hardware performance and smoother locomotion. However, Pupper robots provide greater learning flexibility for developers who want open-source control.
Pupper Robot vs Petoi Bittle
Petoi Bittle is smaller and easier for beginners. Pupper robots support more advanced robotics concepts and AI experimentation.
Pros and Cons of Pupper Robots
Advantages
- Open-source ecosystem
- Lower cost than commercial robot dogs
- Excellent ROS learning platform
- Strong educational value
- Large robotics community support
Limitations
- Requires technical setup knowledge
- Not fully plug-and-play
- Assembly can take time
- Limited industrial durability
These limitations are important because many first-time buyers underestimate the software learning curve.
Is a Pupper Robot Worth It?
A Pupper robot is worth considering for users interested in robotics, AI programming, and ROS development.
It works best for:
- Robotics students
- AI developers
- STEM educators
- Engineering hobbyists
It may not suit users who only want entertainment or fully automated consumer robots.
For learning robotics fundamentals, however, Pupper robots provide substantially more hands-on experience than many beginner kits currently available.
Frequently Asked Questions
How much does a Pupper robot cost?
Mini Pupper kits usually cost several hundred dollars. Advanced Stanford Pupper builds can cost more depending on hardware selection.
Can beginners build a Pupper robot?
Yes, but some Linux and Raspberry Pi knowledge helps significantly.
Does Pupper robot support AI projects?
Yes. Many users integrate computer vision, reinforcement learning, and voice AI systems.
Does it work with Raspberry Pi 5?
Many newer builds are being adapted for Raspberry Pi 5 compatibility.
Is Mini Pupper open source?
Parts of the software ecosystem are open source, depending on the version and vendor support.
Final Thoughts
Pupper robots filled an important gap between beginner robotics kits and expensive commercial robot dogs. Their combination of open-source software, ROS support, and AI experimentation makes them highly useful for robotics education.
Mini Pupper is better for beginners who want easier setup and lightweight experimentation. Stanford Pupper is more suitable for advanced robotics learning and research-level development.
For users interested in practical robotics skills instead of prebuilt entertainment gadgets, the Pupper robot platform offers long-term educational value and hands-on experience.




[…] Read Also: https://techainewstoday.com/ai_technology/pupper-robot/ […]
[…] The operational value of blockchain depends on implementation quality and integration with existing systems. […]