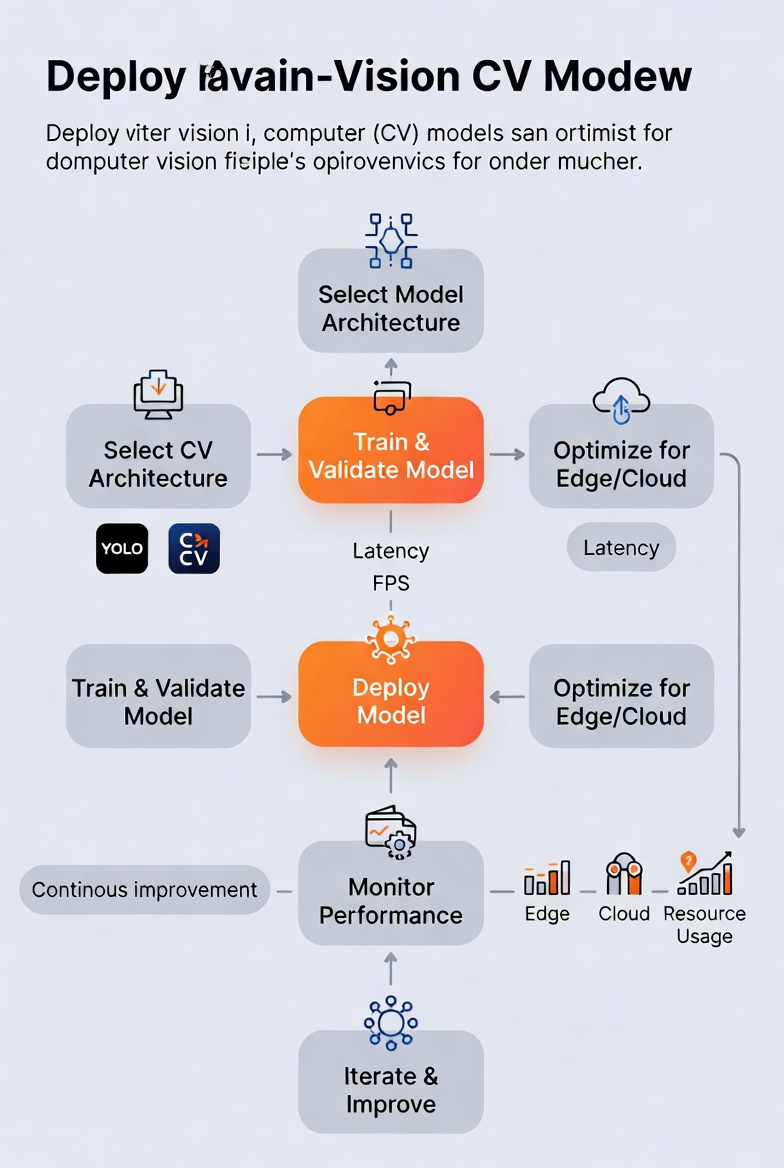
Choosing the right model architecture decides whether your computer vision system runs smoothly in production or fails under real load. Poor choices lead to high latency, excessive costs, or unreliable performance. This guide covers practical best practices that balance accuracy, speed, and efficiency for CV deployments.
Key deployment metrics matter most. Target under 10ms latency for real-time applications. Keep model size below 50MB for edge devices. Aim for 30+ FPS on target hardware. Studies show up to 70-80% of CV projects face issues due to mismatched architectures during scaling.
YOLO series models currently dominate real-time detection. EfficientNet variants excel in classification under resource constraints. Hybrid CNN-Transformer designs work for complex segmentation tasks. These choices directly impact power consumption, memory usage, and inference costs.
Discover More : How to Build a Computer Vision Data Pipeline
Understanding Deployment Constraints First
Start with hardware and requirements before picking any architecture. Cloud GPUs handle larger models easily. Edge devices like NVIDIA Jetson or mobile NPUs demand lightweight designs.
Core trade-offs include:
- Accuracy vs. latency
- Model size vs. throughput
- Power draw vs. performance
For example, YOLO11m achieves 51.5% mAP at 4.7ms on T4 GPU with TensorRT. Larger models like EfficientDet-d5 take over 67ms for similar accuracy.
Create a decision matrix for your use case. Real-time video needs single-stage detectors. Batch processing tolerates heavier backbones. Factor in memory footprint early to avoid out-of-memory errors later.
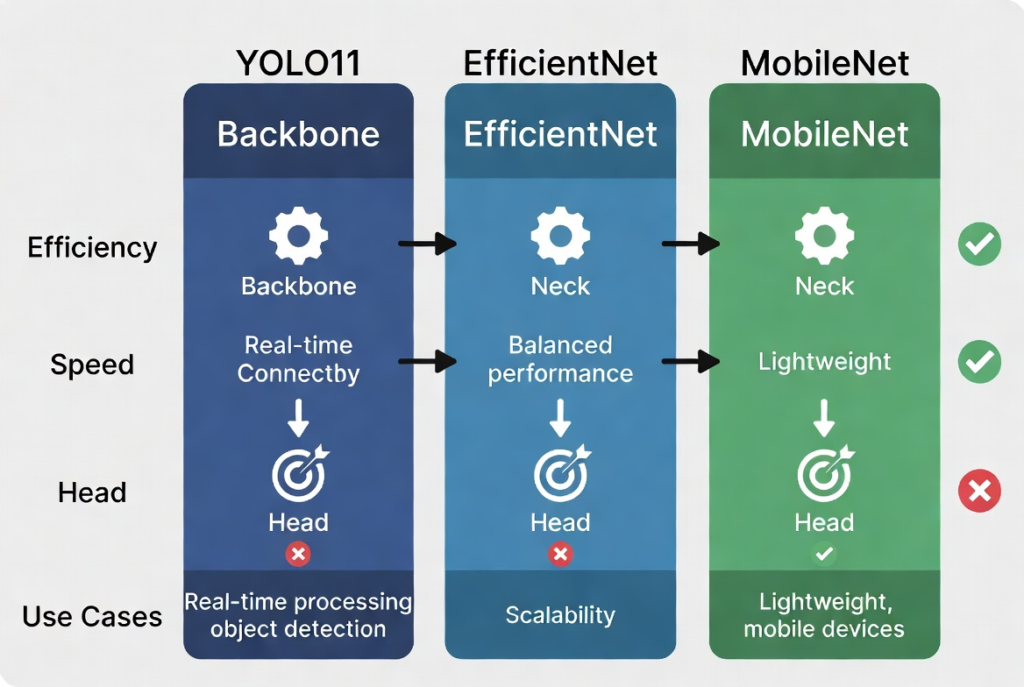
Core Model Architecture Families That Work in Production
CNN-based models remain reliable. MobileNetV3 uses depthwise separable convolutions for mobile and edge deployments. It delivers strong efficiency on low-power hardware.
EfficientNet applies compound scaling to optimize depth, width, and resolution together. This family performs well for image classification in production. Variants like EfficientNet-Lite suit edge environments.
YOLO series leads object detection. YOLOv11 and newer versions offer anchor-free designs and fast inference. They support detection, segmentation, and classification in one framework. YOLO11n runs at 1.5ms CPU ONNX with 39.5 mAP, making it ideal for edge.
Vision Transformers (ViT, Swin) shine in scenarios needing global context. They often require quantization and pruning for edge use. Hybrids like RT-DETR combine strengths for better generalization.
Wikipedia link: Learn more about the foundational Convolutional Neural Network concepts that power most production CV systems.
Optimization Techniques That Deliver Results
Apply compression methods after selecting a base architecture. Structured pruning removes entire filters while maintaining accuracy. Quantization to INT8 often cuts size by 4x with minimal accuracy drop.
Knowledge distillation transfers capabilities from large teacher models to smaller student versions. This works especially well for edge CV deployments.
Hardware-aware Neural Architecture Search (NAS) produces models tuned for specific chips. Test multiple variants early using tools like ONNX and TensorRT.
Avoid over-optimization. Excessive pruning can hurt robustness against varying lighting or angles common in real deployments.
Edge vs Cloud Deployment Recommendations
Edge deployments prioritize speed and privacy. Use YOLO-Nano/Small or MobileNetV3. Quantize aggressively. Deploy with OpenVINO for Intel or TensorRT for NVIDIA Jetson. These setups achieve sub-10ms inference with low power.
Cloud setups focus on scale. Larger YOLO or RT-DETR models handle batch processing. Use dynamic batching and auto-scaling in Kubernetes. Triton Inference Server manages multiple models efficiently.
Hybrid approaches send simple tasks to edge and complex ones to cloud. This reduces bandwidth and latency.
Task-specific tips:
- Object detection → YOLO11
- Segmentation → MobileSAM variants
- Classification → EfficientNet-Lite
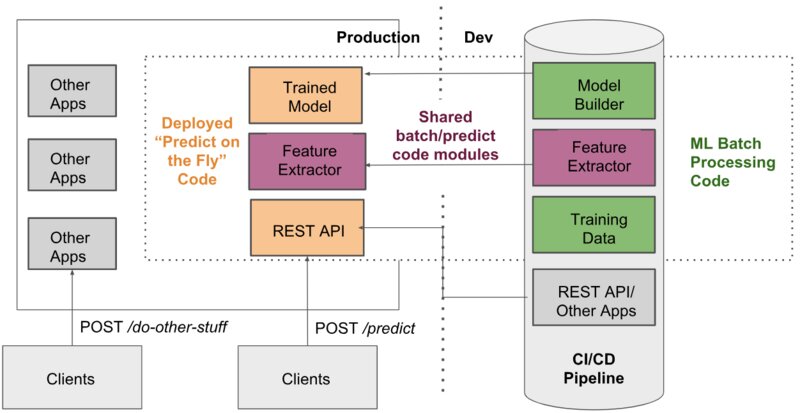
Integration and Serving Best Practices
Export models to ONNX for broad compatibility. Convert to TensorRT for maximum NVIDIA performance. Containerize with Docker for consistent environments across teams.
Serving options include TorchServe, TensorFlow Serving, or NVIDIA Triton. Design APIs with gRPC for lower latency than REST in high-throughput CV systems.
Implement proper batching strategies. Monitor concurrent requests to prevent bottlenecks. Version your architectures in MLOps pipelines for safe updates.
Monitoring, Maintenance, and Iteration
Model drift affects visual systems when lighting, seasons, or camera angles change. Track input data statistics and prediction confidence.
Set up A/B testing for new architectures in shadow mode. Measure real metrics before full rollout. Retrain pipelines should include architecture comparisons.
Address security with input validation against adversarial examples. Obfuscate models where needed for IP protection.
Real-World Benchmarks and Lessons
On Jetson Orin platforms, optimized YOLOv8/YOLO11 variants deliver strong speed-accuracy balance. Smaller models consume less energy per inference, suiting battery-powered systems.
Manufacturing defect detection often succeeds with edge YOLO setups. Retail analytics benefit from EfficientNet for product classification. Autonomous systems use RT-DETR for better generalization.
Common failure: Deploying heavy ViT models on edge without optimization. Result: High latency and overheating. Always benchmark on target hardware early.
Performance tables consistently show YOLO11 variants outperforming older detectors in production scenarios.
Actionable Checklist for Your Next CV Project
- Define latency, throughput, and power targets first.
- Select base architecture matching hardware.
- Apply quantization
- Test on real deployment hardware.
- Set up monitoring for drift and performance.
- Plan versioning and rollback strategies
Follow these practices to build reliable CV systems. Experiment with Ultralytics YOLO framework for quick starts. Adjust based on your specific constraints and data.
This approach comes from real deployment patterns seen across edge and cloud environments in 2026. Focus on metrics that matter to your users and business outcomes.






[…] – 25May2026 AI Technology Computer Vision Ethics & Bias Mitigation Guide AI Technology Model Architecture Best Practices for CV Deployments in 2026 […]
[…] How to Build Your Computer Vision Data Pipeline Model Architecture Best Practices for CV Deployments […]